How suppliers can win without picking the wrong horse.
Volkswagen Group will use XPENG’s technology for its next-generation China vehicles.
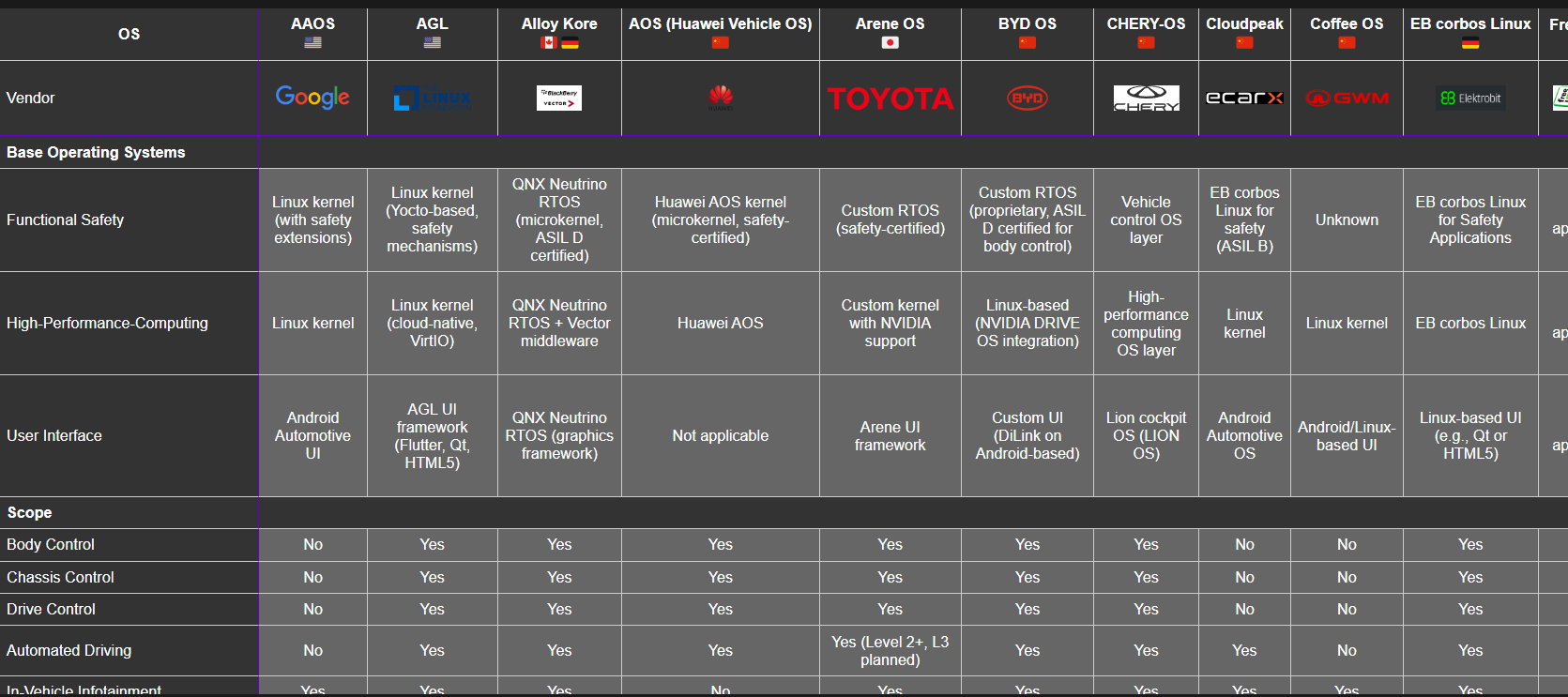
That’s not just a sourcing decision. It means VW is now running three parallel architectures for its future models: MEB+, Rivian’s RVTech, and XPeng’s CEA platform.
For suppliers, this creates a familiar but uncomfortable situation. If you align your product development with the wrong architecture, you risk losing access to high-volume programs. If you try to serve all three separately, your R&D costs multiply.
The winning approach is different.
👉 ZF Group demonstrated it when they sold their #ADAS division and doubled down on what they do best: brake-by-wire, steer-by-wire, integrated chassis control. Those components work identically whether they’re bolted into a NIO, a VW on MEB+, or a future Rivian-powered Audi.
We explored this strategy in a new analysis. It covers:
👉 Which deep-tech components travel across all architectures
👉 How to validate your product against multiple platforms simultaneously
👉 Why “platform-agnostic” is not a compromise but a competitive advantage
The full piece is here for anyone navigating VW’s multi-platform reality: https://viable works/sdv/vws_three_architecture_gamble